Designing a Rover for the NASA 2022 Big Idea Challenge
- Dylan Cecere
- Jan 16, 2023
- 4 min read

Updated: Aug 28, 2023
The task for this competition was to design an exploration rover that used unconventional rover mechanics to collect useful data/samples on Mars during a future mission.
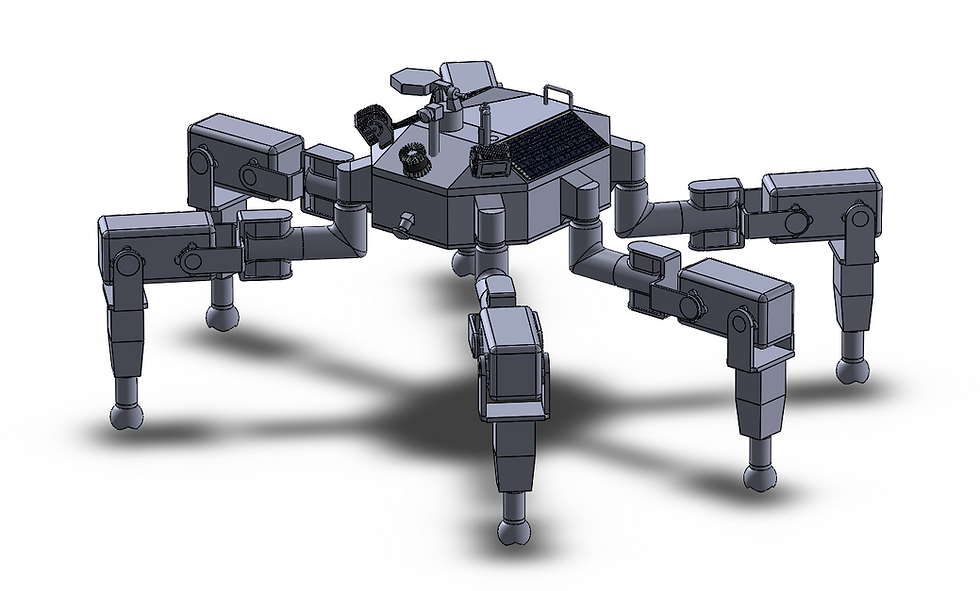
Our team decided to build a hexapod rover that would explore lunar lava tubes. Our team faced many problems and challenges over the course of this 4 month project, making it very educationally dense and rewarding (especially as an incoming freshman).
Our team started off in the first month by brainstorming different interesting robotic mechanics that might have interesting use cases on lunar settings. We also researched the different data sets and questions about mars that would be the most rewarding to answer.
After the first few meetings we had decided to explore lunar lava tubes. These ancient passage ways were once pockets of thermal energy. This type of setting would be ideal for life forms at the time. Our hope was to make a rover that could explore these cave systems and use bioluminescent light to look for traces of previous life forms. We hoped to capture images and rock samples while in the caves before making our way back out to recharge our batteries and transmit data. We envisioned that the samples we collect could be picked up by a future mission similar to the system Perseverance is using.
After deciding on this particular challenge, we researched robotic systems that explore caves here on earth as well as the different challenges that cavers face when they explore caves. This proved to be a very difficult challenge. Caves are very dangerous and unpredictable landscapes. It would not be enough to get our rover deep into one of these caves, we would need to get it back out to have any hope of recovering samples and data. We began facing issues of making a battery last long enough to make a trip inside and out of a cave that could last hours or even days on end before exiting and recharging via solar panels. We would need to have sunlight accessible when the rover exited the caves or it would run out of power and become a sitting duck to any perilous weather/storms before the sun did come out again.
There were design issues of maneuvering the cave systems in two directions. We also faced the issue of localizing our rover via software so that it perceives the cave system, decides the best path to take, and remembers the cave system so that it is able to navigate back out of the cave. All of these tasks being done autonomously, as we would not have any connection with a rover that enters a cave. These are just some of the countless challenges that we had to think about during the course of this project.
We did our best to face each challenge as it came along and not get overwhelmed with the magnitude of the problem.
We decided on making a hexapod drone because of their many degrees of freedom, allowing us high maneuverability in a cave. The spider-like walking motion would allow us at least 3 feet touching a surface at all times as we moved the other 3 feet. These 3 points of contact would hopefully have given us reliable balance, which was imperative.
In November, as we finalized our research and brainstorming phase of the project, I was made the design lead for the project. Manuel, the project lead, understood that I had just started learning SolidWorks and had no prior design or engineering leadership experience. However, he appreciated my dedication to the project and naïve perspective when it came to thinking of "out of the box" solutions to some of our problems.
As I took the leadership position we had roughly a month and half to finish a proprietary design for the competition submission. It was difficult to figure out where to begin on this rover design. We decided to just begin creating a general shape for the rover that we would like to use.
This process then led us to our first conclusion, which is that the size of our rover would inevitably depend on the sizes of the necessary parts that we would need to use within the rover. The main constraint was the size of the battery that we would need to use to traverse for hours/days on end within the caves. Finding a suitable battery was one of the tasks of the Thermal team. They also were researching systems to heat/cool our rover in the extreme temperatures on mars. It was very important that the design team and Thermal team met weekly to discuss the space and design requirements that they needed for their hardware/systems.
The last team on the project was the Lunar Team. They researched the mars environment to find any potential issues and situations that we might face. The design team worked with the Lunar team quite closely to eventually design the feet of our rover, which had to have enough surface area to float above lunar regolith, but not have too much surface area that our maneuverability in the lava tubes would be decreased.
Separately, the design team focused on the hardware needed to allow the rover to maneuver. We spent a week just researching powerful robot actuators as well as the electrical systems needed to control them. This was the most rewarding part of the project for me because I learned how passionate I was about robotics and designing robotic systems.
As the deadline approached and my team size had decreased to approximately 4 engineers due to other commitments during the winter break period, I made the decision to split the design team in 2. One sub-team would focus on the legs of the rover, while the other would focus on the body. Each team separately made their parts, and after making a few adjustments to the sections of our assemblies that connected the two together, the preliminary rover design was complete.
The last step of the process was researching hardware that could be used for communication, lighting, collecting samples, vision and charging. I went through each of these categories, finding potential hardware on the market that could satisfy our needed and presented my findings to the project leads, so that they could present these considerations in the project proposal.



Comments